ĪĪĪĪĮī┘╣▄ĖĪūė┴„┴┐ėŗį┌š¹éĆ£y┴┐▀^│╠░³└©ą┼╠¢½@╚Ī,£žČ╚čaāöĪó┴„┴┐ą▐š²ĪóLCDę║Š¦’@╩ŠĄ╚Łh╣ØĪŻ
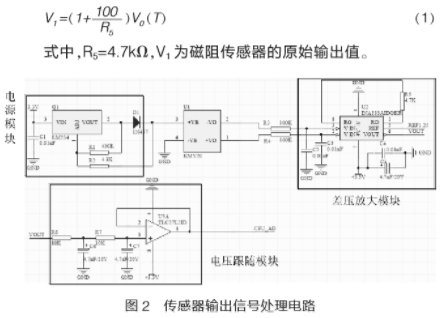
ą┼╠¢▓╔╝»░³└©£žČ╚é„ĖąŲ„▌ö│÷ą┼╠¢½@╚Ī║═┤┼ūĶé„ĖąŲ„ą┼╠¢½@╚Ī,£žČ╚é„ĖąŲ„Ą─▌ö│÷ą┼╠¢═©▀^SPIĘĮ╩Įé„╦═Įo╬ó╠Ä└ĒŲ„,ė├ė┌ī”┤┼ūĶé„ĖąŲ„Ą─▌ö│÷ū÷£žČ╚čaāöŻ¼┤┼ūĶé„ĖąŲ„Ą─▌ö│÷ą┼╠¢īóė├ė┌┴„┴┐ėŗ╦Ń,Įø▀^ą┼╠¢Ę┼┤¾╠Ä└Ē║¾ų▒Įėé„╦═ų┴╬ó╠Ä└ĒŲ„ĪŻłD2×ķ┤┼ūĶé„ĖąŲ„▌ö│÷ą┼╠¢╠Ä└ĒĄ─ė▓╝■ļŖ┬ĘłDĪŻ░³└©ļŖį┤─ŻēK▓ŅĘųĘ┼┤¾─ŻēK║═ļŖē║Ė·ļS─ŻēKĪŻļŖį┤─ŻēK▓╔ė├║Ń┴„į┤ĮoKMY20┤┼ūĶé„ĖąŲ„╣®ļŖ,į┌--Č©│╠Č╚╔Ž£pąĪ┴╦£žŲ»ī”é„ĖąŲ„▌ö│÷Ą─ė░Ēæ"ĪŻ▓ŅĘų─ŻēK═Ļ│╔ī”é„ĖąŲ„▌ö│÷ą┼╠¢Ą─Ę┼┤¾╠Ä└ĒŻ¼ļŖē║Ė·ļS─ŻēK£pąĪ┴╦é„ĖąŲ„Ą─▌ö│÷ūĶ┐╣ĪŻÅ─łD2┐╔ų¬,ĮøĘ┼┤¾╠Ä└Ē║¾Ż¼é„ĖąŲ„Ą─▌ö│÷ą┼╠¢Ę∙ųĄ×ķ:
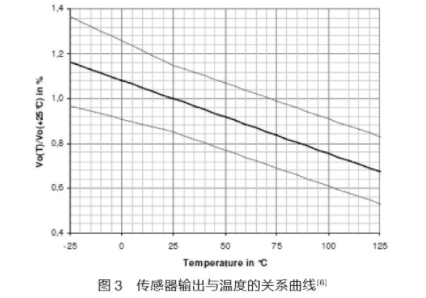
łD3╩Ūé„ĖąŲ„▌ö│÷ą┼╠¢┼c£žČ╚Ą─ĻPŽĄŪ·ŠĆŻ¼┐╔ęŖį┌ę╗Č©ĘČć·ā╚,é„ĖąŲ„▌ö│÷ą┼╠¢Ę∙ųĄ┼c£žČ╚│╔Ę┤▒╚ĻPŽĄ,┐╔ęįĄ├ĄĮ:
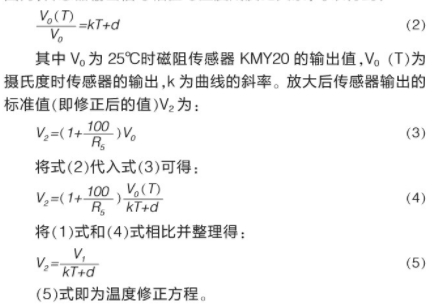
į┌╔Žę╗╣ØęčĮøĮķĮB▀^Ż¼ĘŪĮėė|╩ĮĖĪūė┴„┴┐ėŗ┴„┴┐£y┴┐ĘĮĘ©ėąöM║ŽŪ·ŠĆĘ©║═ĘųČ╬ŠĆąįą▐š²Ę©Ż¼ĮėŽ┬üĒīóŠ▀¾wĮķĮB▀@ā╔ĘNĘĮĘ©ĪŻ▒Ē1╩ŪīŹ“×£yĄ├Ą─é„ĖąŲ„▌ö│÷V2┼c«öŪ░┴„┴┐(┴„╦┘)Ą─ī”æ¬ĻPŽĄĪŻ
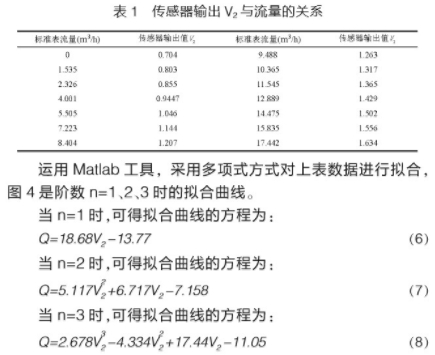
īóé„ĖąŲ„Ą─▌ö│÷V2┤·╚ļ╩Į(6).(7).(8)╝┤┐╔Ą├ĄĮ«öŪ░┴„┴┐Ż¼└^Č°╠Ä└ĒŲ„═©▀^SPI═©ą┼īó┴„Ģ׹┼Žóé„╦═ų┴LCD’@╩Š─ŻēKĪŻ▒Ē2~▒Ē4Ęųäe╩Ūn=1,2,3Ģr▓╔ė├öM║ŽŪ·ŠĆĘ©įOėŗĄ─ĖĪūė┴„┴┐ėŗĄ─£y┴┐öĄō■┼cś╦£╩▒Ē╦∙£yöĄō■Ą─ī”▒╚ĮY╣¹,▓ó╦Ń│÷╩ŠųĄš`▓ŅĪŻ╩ŠųĄš`▓ŅĄ─ėŗ╦Ń╣½╩Į×ķ:

ŲõųąQmax×ķāx▒ĒūŅ┤¾£y┴┐┴„┴┐,Qvs×ķ▒╗Öz┴„┴┐ėŗ£yĄ├Ą─┴„┴┐,Qn×ķś╦£╩┴„┴┐čbų├į┌įō³cįō£yĄ├Ą─ś╦£╩¾wĘe┴„┴┐ĪŻ
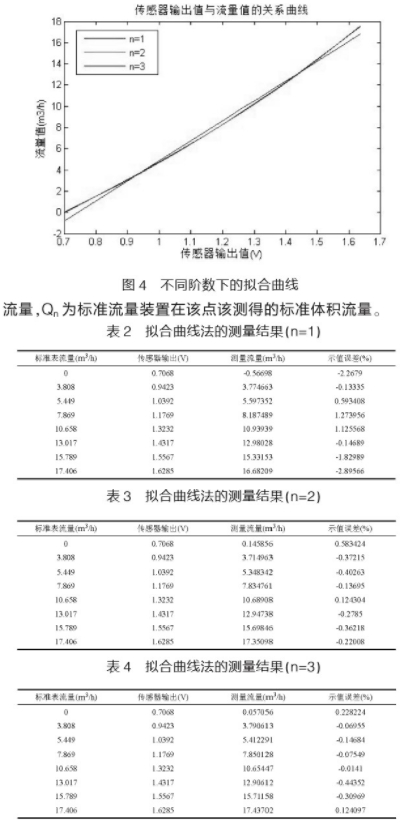
Å─▒Ē2~▒Ē4┐╔ų¬Ż¼ęįļAöĄn=1Ą├ĄĮĄ─öM║ŽŪ·ŠĆėŗ╦Ń┴„¾w┴„┴┐,╩ŠųĄš`▓ŅūŅ┤¾į┌2%ęį.╔Ž,öM║Žą¦╣¹▓╗└ĒŽļ,Č°ęįļAöĄn=3Ą├ĄĮĄ─öM║ŽŪ·ŠĆėŗ╦Ń┴„¾w┴„┴┐Ģr,╩ŠųĄš`▓Ņį┌1%ęįā╚,ØMūŃ£y┴┐ę¬Ū¾,Ą½ė╔ė┌öM║ŽĘĮ│╠ŽÓī”Å═ļs,╝ė┤¾┴╦╦ŃĘ©Ą─Å═ļsČ╚,╩╣┴„┴┐ėŗ╦Ńš╝ė├CPUĢrķgūāķL,ĮĄĄ═┴╦ŽĄĮy£y┴┐Ą─īŹĢrąįĪŻ╦∙ęį▒ŠįOėŗ▀xō±n=2ĢröM║ŽĄ├ĄĮĄ─ĘĮ│╠üĒėŗ╦Ń┴„┴┐,▓╗āHØMūŃ┴╦ŽĄĮyĄ─īŹĢrąįę¬Ū¾,Č°ŪꎥĮyĄ─£y┴┐Š½Č╚ę▓į┌1%ęįā╚ĪŻ
ĘųČ╬ą▐š²Ę©īóš¹éĆ£y┴┐ĘČć·Ęų×ķ6~12éĆČ╬Ż¼├┐Č╬ų«ķg▓╔ė├▓╗═¼Ą─ŠĆąįĘĮ│╠▀Mąąą▐š²ĪŻ▒Ē5╩Ū▓╔ė├ĘųČ╬ŠĆąįĘ©įOėŗĄ─Įī┘╣▄ĖĪūė┴„┴┐ėŗ╦∙£y┴„┴┐┼cś╦£╩▒Ē╦∙£y┴„┴┐Ą─öĄō■ĪŻ
ī”▒╚öM║ŽŪ·ŠĆĘ©(n=2)║═ĘųČ╬ŠĆąįą▐š²Ę©Ą─£y┴┐ĮY╣¹┐╔ęį┐┤│÷,öM║ŽŪ·ŠĆĘ©Ą─╩ŠųĄš`▓Ņ▌^ĘųČ╬ŠĆąįą▐š²Ę©Ė▀,╦∙ęį▓╔ė├öM║ŽŪ·ŠĆĘ©Ė³└¹ė┌╠ßĖ▀ŽĄĮyĄ─£y┴┐Š½Č╚ĪŻ |