1.ŽĄĮy(t©»ng)ė▓╝■
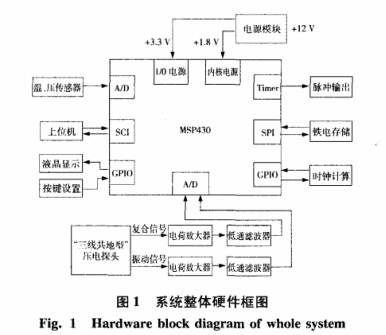
£uĮų┴„┴┐ėŗ(j©¼)ŽĄĮy(t©»ng)Ą─š¹¾wė▓╝■ĮY(ji©”)śŗ(g©░u)ęŖłD1ĪŻš¹¾wė▓╝■ĮY(ji©”)śŗ(g©░u)┐╔ęįĘų×ķęįŽ┬ÄūéĆ(g©©)▓┐Ęų:Öz£y(c©©)Å═(f©┤)║Žą┼╠¢(h©żo)║═š±äė(d©░ng)ą┼╠¢(h©żo)Ą─“╚²ŠĆ╣▓Ąžą═”ē║ļŖ╠ĮŅ^é„ĖąŲ„ęį╝░║¾└m(x©┤)╠Ä└ĒļŖ┬Ę;×ķŽĄĮy(t©»ng)Ė„─ŻēK╠ß╣®ļŖį┤Ą─ļŖį┤ļŖ┬Ę;ē║┴”é„ĖąŲ„Ą─£žČ╚Īóē║┴”Öz£y(c©©)ļŖ┬Ę╝░║¾└m(x©┤)š{(di©żo)└ĒļŖ┬Ę;╔ŽĪóŽ┬╬╗ÖC(j©®)═©ėŹĄ─SCI═©ėŹ─ŻēKļŖ┬Ę;Ė„ĘN¼F(xi©żn)ł÷(ch©Żng)īŹ(sh©¬)Ģr(sh©¬)ģóöĄ(sh©┤)’@╩ŠĄ─ę║Š¦’@╩ŠļŖ┬Ę;Ė„ĘNĄ¶ļŖöĄ(sh©┤)ō■(j©┤)▒Ż┤µĄ─ĶFļŖ┤µā”(ch©│)FRAMļŖ┬Ę;Ą¶ļŖĢr(sh©¬)ķgėŗ(j©¼)╦ŃĄ─DS1302Ģr(sh©¬)ķgļŖ┬Ę;¼F(xi©żn)ł÷(ch©Żng)ė├æ¶ĘŁĒō(y©©)▀xō±Ą─░┤µI▌ö╚╦ļŖ┬Ęęį╝░├}ø_▌ö│÷ļŖ┬Ę;▓╔ė├MSP430å╬Ų¼ÖC(j©®)Ą─╬ó╠Ä└ĒŲ„ĪŻ
2.ĘŪŠĆąįāx▒ĒŽĄöĄ(sh©┤)ą▐š²
ļSų°╣żśI(y©©)╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣║═▀M(j©¼n)▓Į,ī”(du©¼)īÆ┴┐│╠ĪóĖ▀Š½Č╚£uĮų┴„┴┐ėŗ(j©¼)Ą─ąĶŪ¾╚šØuŲ╚Ūą,Ė„ĘNāx▒ĒŽĄöĄ(sh©┤)ĘŪŠĆąįą▐š²ĘĮĘ©║═æ¬(y©®ng)ė├ŽÓ└^│÷¼F(xi©żn)ĪŻūŅįń│÷¼F(xi©żn)Ą─╩Ū▓╔ė├ė▓╝■ļŖ┬Ę▀M(j©¼n)ąąą▐š²ĪŻįōĘĮĘ©ĘĆ(w©¦n)Č©┐╔┐┐,Ą½ų╗▀mė├ė┌å╬š{(di©żo)╔Ž╔²(╗“Ž┬ĮĄ)Ą─Ū·ŠĆą╬ĀŅ!5]ĪŻė╔ė┌ļŖūė╝╝ąg(sh©┤)╠žäe╩Ūå╬Ų¼ÖC(j©®)╝╝ąg(sh©┤)Ą─čĖ├═░l(f©Ī)š╣,▀@ę╗å¢(w©©n)Ņ}Ą├ĄĮ┴╦Ė³║├Ą─ĮŌøQĪŻė╔īŹ(sh©¬)ļHś╦(bi©Īo)Č©Ą─ĮY(ji©”)╣¹┐╔ęį╗žÜw×ķāx▒ĒŽĄöĄ(sh©┤)┼cŅl┬╩║»öĄ(sh©┤)ĻP(gu©Īn)ŽĄ╩Į,▓óīó▒Ē▀_(d©ó)╩Į┤µ╚╦å╬Ų¼ÖC(j©®)ŽĄĮy(t©»ng)Ą─│╠ą“┤µā”(ch©│)Ų„ųąĪŻ£y(c©©)┴┐é„ĖąŲ„ą┼╠¢(h©żo)Ņl┬╩,Ė∙ō■(j©┤)║»öĄ(sh©┤)▒Ē▀_(d©ó)╩Įėŗ(j©¼)╦Ń│÷┤╦Ģr(sh©¬)Ą─āx▒ĒŽĄöĄ(sh©┤),Å─Č°īŹ(sh©¬)¼F(xi©żn)āx▒ĒĘŪŠĆąįą▐š²ĪŻŽÓĻP(gu©Īn)╣½╩Į╚ńŽ┬:
ŲĮŠ∙āx▒ĒŽĄöĄ(sh©┤)`K:
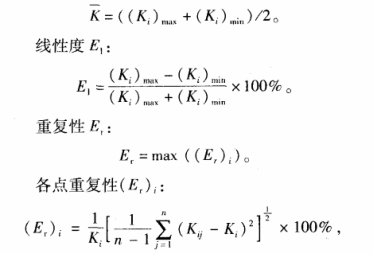
╩Įųą:Kiję╗Ą┌iéĆ(g©©)Öz£y(c©©)³c(di©Żn)Ą┌j┤╬Öz£y(c©©)Ą─āx▒ĒŽĄöĄ(sh©┤)ĪŻą▐š²ĘĮĘ©Ą─īŹ(sh©¬)¼F(xi©żn)▀^(gu©░)│╠:
(1)═©▀^(gu©░)╦«┴„┴┐ś╦(bi©Īo)£╩(zh©│n)čbų├£y(c©©)┴┐K-QvŪ·ŠĆųąĄ─╠žš„³c(di©Żn)ĪŻ├┐éĆ(g©©)┴„┴┐³c(di©Żn)£y(c©©)┴┐╚²┤╬,ŽÓ═¼Ģr(sh©¬)ķgtā╚(n©©i)├┐┤╬├}ø_×ķN1ĪóN2║═N3ėŗ(j©¼)╦ŃŅl┬╩║¾,▓╔ė├╚²┤╬śėŚl[6)öM║Ž,└LųŲK-Qv╠žš„Ū·ŠĆĪŻ└Ēšō╔Ž£y(c©©)┴┐³c(di©Żn)įĮČÓįĮ£╩(zh©│n)┤_ĪŻŅl┬╩ėŗ(j©¼)╦Ń╩Į×ķƒ=(N1+N2+N3)/3tĪŻ(2)ėŗ(j©¼)╦Ń£uĮų┴„┴┐ėŗ(j©¼)╠žš„Ū·ŠĆĄ─ŲĮŠ∙ųĄK,░┤Š½Č╚ę¬Ū¾ėŗ(j©¼)╦ŃKmin║═KmaxĪŻī”(du©¼)ė┌ÜŌ¾w£uĮų┴„┴┐ėŗ(j©¼),ŠĆąįš`▓ŅE1=0.015ĪŻ╦∙ęį,Kmin=K-KE1/2,Kmax=K+KE1/2ĪŻ
(3)ėŗ(j©¼)╦ŃąĶꬹ▐š²Ą─Ņl┬╩Č╬ĪŻį┌┤²ą▐š²Ņl┬╩Č╬ā╚(n©©i)▀xō±▓ĮķL(zh©Żng)t=0.015Hz,├┐Ė¶lėŗ(j©¼)╦ŃK,├┐-ę╗éĆ(g©©)ƒiī”(du©¼)æ¬(y©®ng)ę╗éĆ(g©©)KiĪŻė╔ƒi/Ki=ƒimin/Knin=fimax/Kmax=qviėŗ(j©¼)╦Ń├┐éĆ(g©©)ƒiīó▒╗ą▐š²│╔Ą─ƒimax║═ƒiminĪŻ.
(4)īóėąĮ╗╝»Ą─ƒimax-ƒimin║Ž▓ó,╝┤īóŽÓÓŃiČ╝ą▐š²×ķ═¼ę╗éĆ(g©©)ƒiĪŻƒjų╗ę¬į┌ƒimax║═ƒiminų«ķgŠ═─▄ē“ØMūŃŠĆąįČ╚ę¬Ū¾,Å─Č°═Ļ│╔ā×(y©Łu)╗»ĪŻ |